La vision humaine comprend des ondes électromagnétiques d’une longueur d’entre 400 et 700 nanomètres. En partant des 700nm en direction des 400 nm, nous avons les couleurs de l’arc en ciel : le rouge @ 600-700nm et le violet @ 400nm, avec l’orange, le jaune, le vert et le bleu entre les deux. La réponse humaine optimale par rapport à la lumière se situe vers les 550 nm, soit au milieu de la bande verte, dont l’illustration se trouve dans cette courbe de réponse :
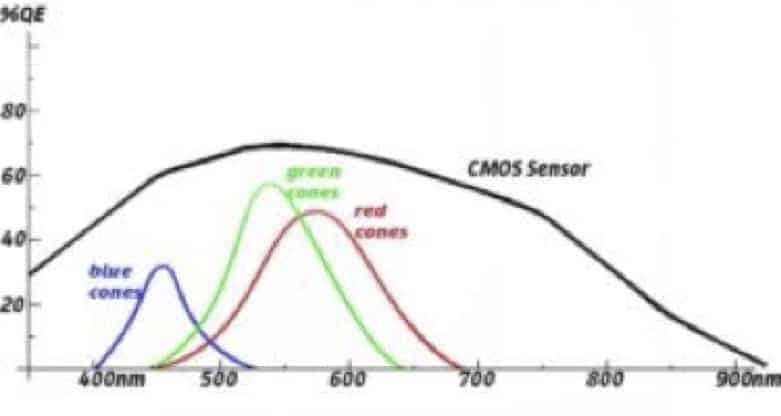
Vous remarquerez les courbes pour le rouge, le vert et le bleu. Ces trois types de photorécepteurs nous donnent la possibilité de percevoir jusqu’à environ 10.000.000 teintes, même si certains d’entre nous ont une acuité beaucoup plus marquée que d’autres. La disparité est beaucoup plus grande chez les animaux. Certains ont jusqu’à 15 photorécepteurs différents, généralement pour des bandes étroites très spécialisées, alors que d’autres sont considérés comme daltoniens.
Les capteurs CMOS, utilisés pour la plupart des caméras numériques, sont sensibles à une bande plus large que les humains et la plupart des animaux, soit en général de 300 nm à 900 nm, représentés par le trait noir sur la courbe de réponse ci-dessus.
Cette divergence de réponse entre les capteurs de caméra et la vue humaine et animale, présente des opportunités ainsi que des problématiques.
L’opportunité majeure réside en l’utilisation des caméras monochromes avec un éclairage proche de l’infra-rouge (Near Infra-Red, ou NIR) pour des applications qui demande un éclairage intense sans déranger les sujets test. Bien des études de poissons zèbres, de chauves-souris et de certains insectes se pratiquent via cette technique, puisque ces animaux ne sont pas sensibles au NIR.
Plus problématique est la reproduction de la couleur par la caméra. Ce processus se résume à trois étapes :
- Un filtre, qui sert à éliminer la lumière qui dépasse le spectre visible, est placé entre l’objectif et le capteur. En général il s’agit d’un filtre anti-IR, qui limite la lumière au-delà de 650 nm. Malgré une lumière conséquente dans cette bande, cette étape est nécessaire parce les humains ne la perçoivent pas. Nous ne devons donc pas l’utiliser si nous cherchons à répliquer la perception humaine. Un exemple serait certains feuillages, qui reflètent une quantité importante de NIR. Sans filtre anti-IR un arbre d’un vert sombre pourrait paraître en rouge vif dans la caméra !
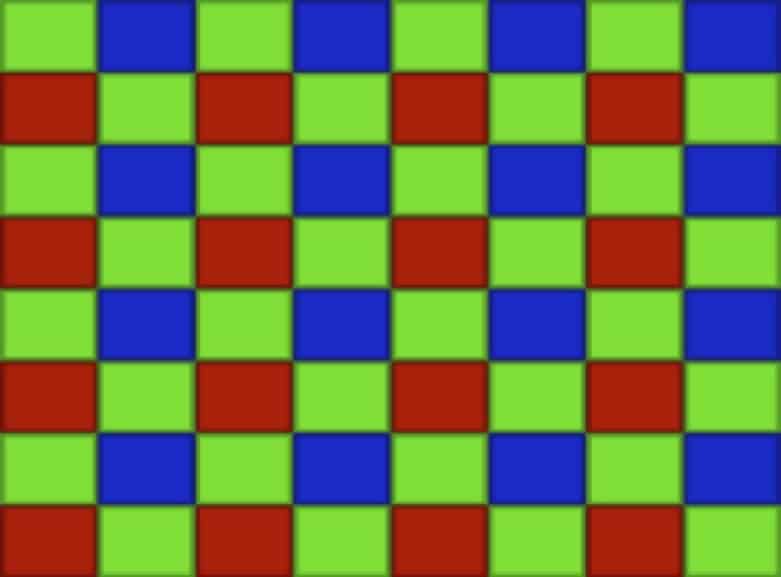
- Une matrice Bayer s’applique aux capteurs couleur. Ce filtre, qui est une matrice de filtres colorés, consiste à poser un filtre rouge, vert ou bleu par dessus chaque pixel du capteur. Ils sont positionnés dans des lignes vert/bleu/vert et rouge/vert/rouge, de manière à ce que la moitié de tous les pixels soient verts, un quart en soient rouges et un quart bleus. De cette façon, chaque pixel ne réagit qu’à la bande de lumière qui correspond approximativement à ce qui serait visible par les courbes rouges, verts et bleus de l’œil humain.
- L’interpolation de la couleur se fait pixel par pixel, afin de rendre les valeurs rouge, vert et bleu pour chacun d’entre eux. Pour chaque pixel individuel, sa valeur est associée à celle des pixels avoisinants pour donner ces valeurs “RGB” (rouge/vert/bleu).
Certaines caméras utilisent des capteurs multiples, chacun possédant sa propre filtration couleur, afin de créer de la couleur. Certains capteurs ont la possibilité de recevoir des données RGB par pixel. Mais la plupart des caméras numériques couleur utilisent les techniques ci-dessus. Il y a quelques inconvénients évidents à utiliser des caméras couleur plutôt que monochromes :
- Presque la moitié de la lumière à laquelle le capteur est sensible, est éliminée par le filtre anti-NIR. Ensuite, pour chaque pixel, une grande partie de la lumière résiduelle, en dehors de sa propre bande de couleur, est également éliminée. Par conséquent, les caméras ont 50% de la sensibilité des caméras monochromes, selon le spectre d’éclairage.
- Les algorithmes d’interpolation sont optimisés pour la lumière naturelle. Il existe de l’éclairage de qualité pour reproduire la lumière blanche et la lumière de jour, mais il est souvent problématique d’obtenir un rendu des couleurs fidèle avec la plupart des éclairages artificiels.
- Afin d’obtenir des valeurs RGB pour chaque pixel, il est nécessaire d’utiliser les pixels environnants, ce qui veut dire que la résolution spatiale pour la caméra couleur n’est pas aussi fine que celle d’une caméra mono. Ceci ne veut pas dire qu’il est impossible d’avoir des images extrêmement nettes en couleur, mais les images mono sont en général encore plus nettes.
Des bords à haut contraste ne fournissent pas d’informations suffisamment détaillées sur les couleurs pour les besoins des algorithmes d’interpolation, avec comme résultat du repliement de couleurs. Par exemple, vous verrez souvent des traces de rouge, de vert et de bleu sur des images de texte en noir et blanc.